
رادار
درگیری SNR-75M3 Fan Song E آخرین سامانهی راداری طراحیشده جهت هدایت
موشکهای سام 2 است. تصاویری که در ادامه ارائه خواهند شد در سال 2000 توسط
میرسلاو گیوروسی از نمایشگاه هوایی تیمیسوارا Timisoara رومانی و برخی
دیگر از موزهی Zsambek مجارستان تهیه شدهاند بخشهای مختلف سامانه را به
نمایش میگذارند و جهت رسیدن به درک صحیح از عملکرد سامانه ما را یاری
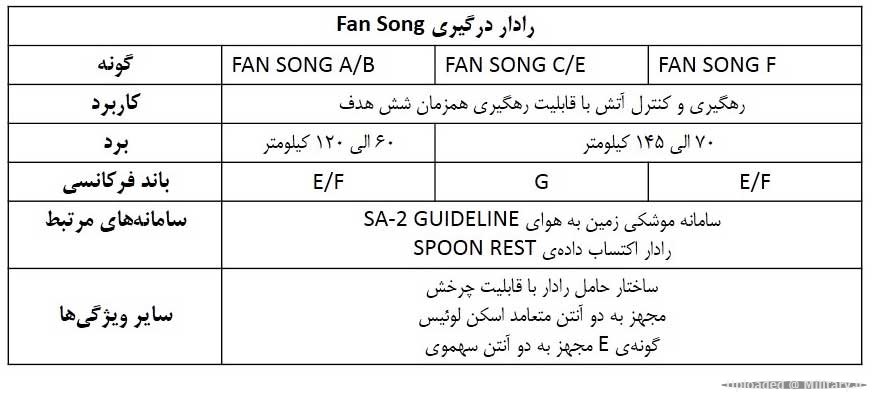
خواهند کرد. لازم به ذکر است سری رادارهای درگیری فن سانگ دارای سه ورژن
است که ما در اینجا به بررسی نسخه E آن بسنده خواهیم کرد و ویژگیهای سایر
نسخهها را به صورت خلاصه در جدولی بیان خواهیم کرد.
فن سانگ یک
رادار درگیری است که جهت استفاده در سامانههای ضدهوایی S-75/SA-2 طراحی و
توسعه داده شدهاند. این سامانه نخستین بار در جنگ ویتنام مورد استفاده
قرار گرفت و بعدها در خاورمیانه و نیز برخی کشورهای آفریقایی بکار گرفته شد
و تا زمانی که روشهای هوشمندانهی جنگ الکترونیکی پا به عرصه وجود
نگذاشتند پای تعداد زیادی از جنگندههای غربی را از عرصهی وجود پاک کرد.
بعدها چینیها اقدام به کپیبرداری از سامانهی مذکور کردند اما در خود
روسیه این سامانه اکنون مورد استفاده نیست. ورود سامانههای قدرتمند
SA-10/20 باعث شد این کماندار پیر از میدان کارزار به خانه سالمندان یا
همان موزهها مهاجرت کند!

به طور
کلی و با انتساب نمونهی چینی شش گونه از این رادار طراحی و تولید شده
است. البته در مورد گونهی چینی اطلاعات چندانی در دست نیست هرچند مطمئنا
بین دو گونه تفاوتهایی وجود خواهد داشت امّا به نظر میرسد اساس پیکربندی
آنتنهای گونهی چینی تفاوت چندانی با رادار روس نداشته باشد.
سری
رادارهای SNR-75 دارای پیکربندی مطابق با استانداردهای مدرن هستند. جهت
بهبود برد درگیری پیکربندی آنتنها در این سامانه نسبتا پیچیده است. در
خورد موشک یک گیرنده در انتها و یک فیوز مجاورتی ضعیف در نوک موشک تعبیه
شده است.
ویژگی اصلی رادار فن سانگ که علت نام گذاری آن نیز هست
بکارگیری پرتو بادبزنی (فن بیم) رفت و برگشتی Flapping است. این پرتوها
توسط رادارهای با ساختار اسکن لوییس تولید میشود و یک کمان 16° را در مدت
زمان 54 میلی ثانیه جاروب میکند. در مدل فن سانگ E میتوان دو آنتن سهموی
با بیم نوک مدادی را نیز مشاهده کرد. در این ورژن تلاش شده سامانه در برابر
تکنیکهای فریب زاویه مقاومسازی شود.
جهت پوشش محیط اطراف رادار به
گونهای طراحی شده که برای پوشش افقی "azimuth" کل سازه قادر به چرخش افقی
است و برای پوشش عمودی آنتنهای ساختار آنتن روی کابین توانایی حرکت در
زاویه عمودی "elevation " را داراست.
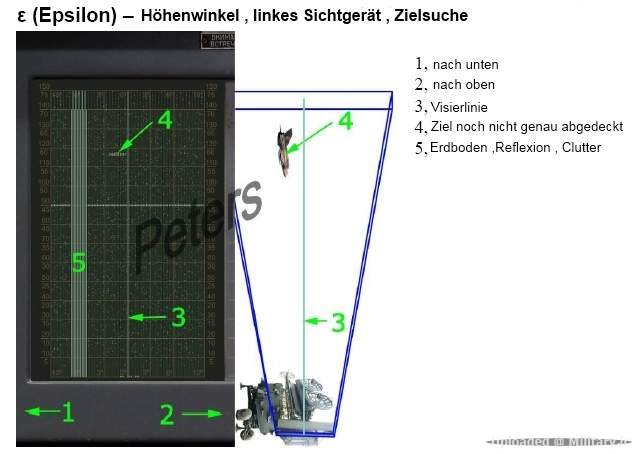
در مد
جستوجو رادار به پویش محیط اطراف میپردازد تا دادههای مربوط به هدف مورد
نیاز مد درگیری تامین شوند. در این حالت آنتنهای P-11 و P-12 فعال شده یک
پرتو با زوایای 7.5° x 16° را تولید میکنند. بزرگ بودن زوایای این پرتو
هرچند دقت رادار را کاهش میدهد اما پوشش مورد نیاز جهت جستوجو را فراهم
کرده و انتظارت اپراتور از یک رادار جستوجو را تامین میکند. در این مد
فرکانس تکرار پالس پایین بوده و 828-1,440 هرتز است و طول پالس جهت افزایش
انرژی ارسالی به روی حداکثر تنظیم میشود.
به محض مشاهدهی هدف رادار به
یکی از مدهای درگیری تغییر حالت میدهد. در این وضعیت رادارهای P-13 و
P-14 وارد کارزار شده و با بکارگیری یک پرتو نوک مدادی به استخراج دقیق
مختصات زاویهای هدف مبادرت میورزند. در این حالت فرکانس تکرار پالس به
1,656-2,880 هرتز افزایش داده شده و طول پالسها کاهش مییابد.

پیکربندی رادار درگیری SNR-75M / Fan Song E
مدهای درگیری رادار دارای دو حالت زیر است:
RS
(Ручное Сопровождение) یا رهگیری دستی: در این مد اپراتور به کمک اسکوپ
راداری یا تلسکوپ تلوزیونی اقدام به رهگیری زاویهای هدف میکند. این مد در
حالتی که محیط آلوده به سیگنالهای فریب و اخلال است و مد خودکار قادر به
رهگیری هدف نیست کارایی دارد.

AS
(Автоматическое Сопровождение) یا رهگیری خودکار: در این مد آنتنهای P-11
و P-12 وارد مد پرتو باریک میشوند و اطلاعات دقیق مورد نیاز جهت درگیری
با هدف را تامین میکنند.

با
شلیک موشک اطلاعات مورد نیاز موشک توسط یک آنتن آپ لینک P-15 به موشک ارسال
میشود و بدین طریق اطلاعات مورد نیاز جهت تصحیح مسیر تامین میشوند. در
صورت موفقیت در رهگیری هواگرد با نزدیک شدن موشک به آن فیوزهای مجاورتی
وجود هدف را تشخیص میدهند و با منفجر کردن سرجنگی آنرا به دیار باقی
میفرستند!

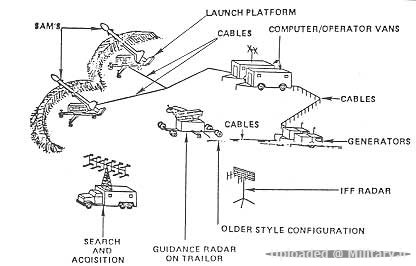
اجزای سامانه به طور کلی شامل موارد زیر است:
1- کابین PV: حامل رادار و اجزای رادیویی
2- کابین UV: محل استقرار فرماندهی و اپراتورها
3- کابین AV: محل قرارگیری اجزای فرکانس پایین IF، سخت افزار MTI، رایانههای رهگیری، فرستنده و گیرنده
4- کابین RV: محل استقرار اجزای تغذیه و تامین توان
علاوه
بر کابین RV در لانچر موشکها نیز واحد تغذیه تعبیه شده است. این پیکربندی
سبب میشود سامانه بدون نیاز به تغذیه خارجی عمل کند و یا در صورت
استفاده از تغذیهی خارجی حساسیتی به نوسانات نداشته باشد.
جهت جابجایی
سامانه از کامیونهای 6×6 ZiL یا UrAL استفاده میشود. البته در برخی
کشورهای خاورمیانه از کشندههای AT-S نیز استفاده شده است.


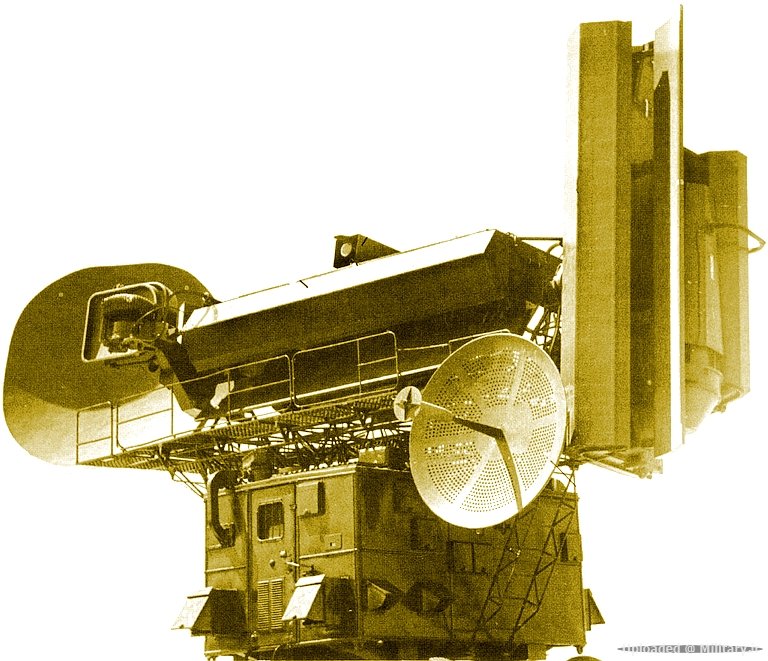
نمای جلو و عقب کابین PV، آنتنها بر روی یک ساختار با قابلیت تغییر زاویه نصب شده است.

آنتن P11، تلسکوپ تلوزیونی را در کنار این آنتن مشاهده میکنید که در محیطهای آلوده به سیگنالهای فریب و اخلال به کار گرفته میشود.

آنتن P-13، جهت اندازهگیری زاویهی عمودی

آنتن P-14، جهت اندازهگیری زاویهی سمت

آنتن آپ لینک P-15، جهت ارسال دادههای هدف به موشک

کابینهای UV و AV



کابین UV

محل استقرار اپراتور هدایت

محل استقرار اپراتورهای کابین UV

استخراج برد مستقر در کابین UV

استخراج زاویه عمودی در کابین UV

استخراج زاویه سمت در کابین UV
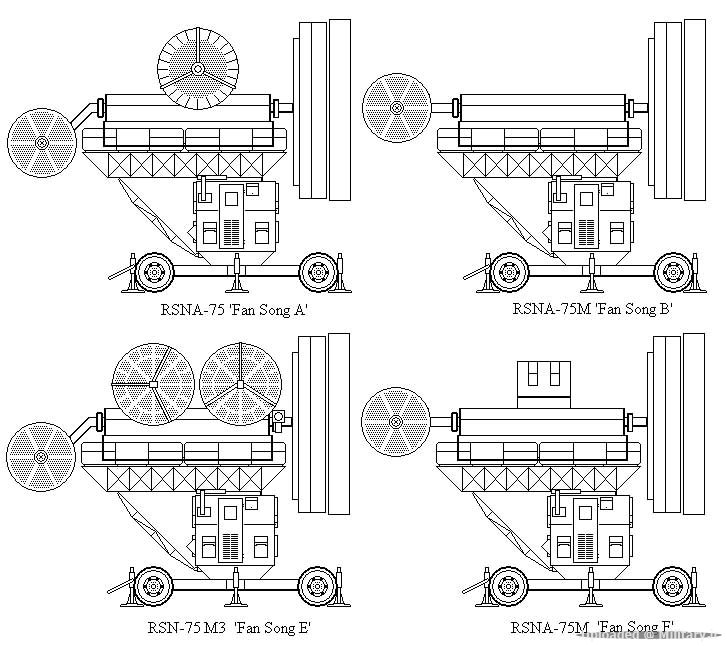
ورژنهای مختلف رادار
پیکربندی سامانه سام 2
سایر تصاویر








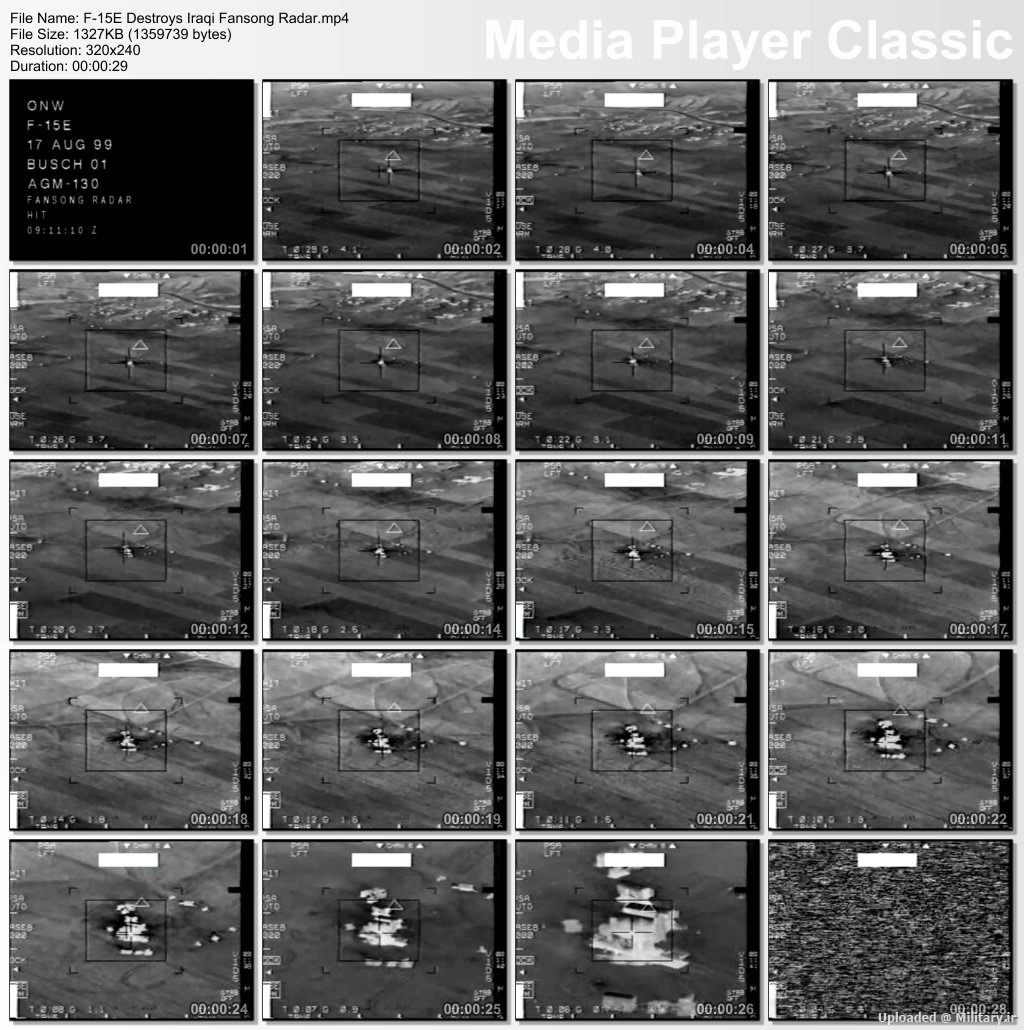
هدف قرار گرفتن فن سانگ توسط یک ایگل
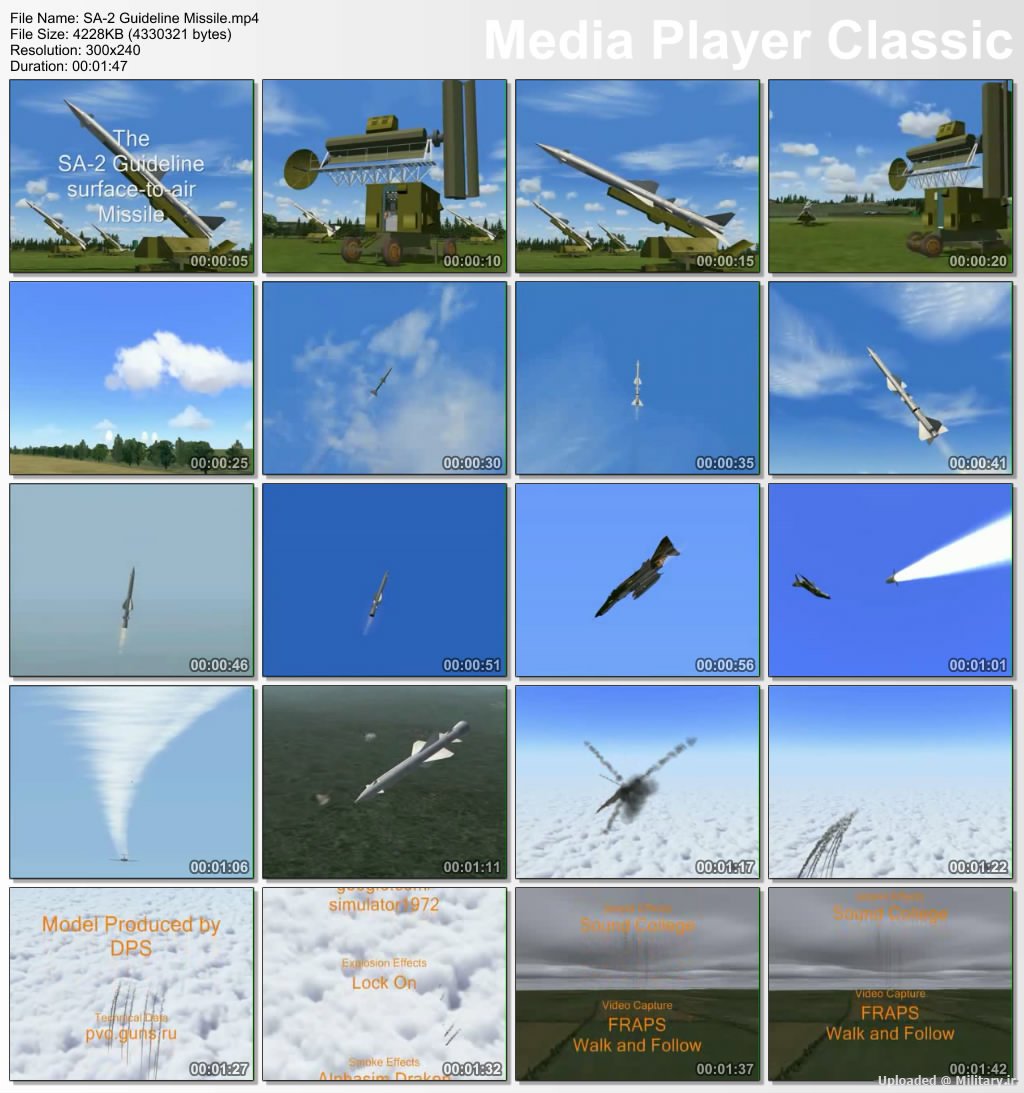
انیمیشنی از عملکرد سام2
سوالات:
1- علت افزایش فرکانس تکرار پالس در مدهای رهگیری چیست؟
2- چرا در مد جستوجو طول پالس را افزایش میدهیم؟ این کار چه معایبی را میتواند در پی داشته باشد؟
3- برداشت خود حقیر این هست شاید اشتباه باشه! چرا در رادارهایی چون فنسانگ مساله استخراج برد اهمیت چندانی ندارد؟
4- مزایا و معایب روش بکار رفته در هدایت موشکهای سام 2 را بیان کنید.
منبع: میلیتاری

 مهدی مهدوی
مهدی مهدوی